Смоделируем ситуацию. Оператор металлообрабатывающего станка после каждого цикла кладёт деталь в один из двух лотков: красный — брак, зелёный — годная. Простая операция, два сценария.
Компания поставила видеоаналитику, чтобы контролировать этот процесс автоматически. Камеры подключили, сценарий настроили. Через неделю выяснилось: модель ошибается в 35% случаев. Рука оператора перекрывает лоток в момент укладки. Освещение между сменами разное. Лотки стоят вплотную, и на видео граница между ними размывается. Вендор сказал, что это ограничение модели — она не обучалась на таких условиях. Операторы отключили звук тревог через три дня из-за ложных срабатываний.
Система работает ровно так, как была обучена. Но задача оказалась сложнее, чем сценарий, под который разработали данное коробочное решение.
Мы в NeuroCore разрабатываем и внедряем ИИ-решения и интеллектуальную видеоаналитику уже 8 лет, а, значит, похожую картину мы видим регулярно. Компания покупает готовое решение, запускает, получает результат хуже ожидаемого, пытается настроить, убеждается что дело не в настройках. Проходит несколько месяцев. Деньги потрачены, задача не закрыта.
Разрыв между "AI для вашей отрасли" и "AI для вашего конкретного процесса" — мы видим в этом реальную проблему рынка. Готовые решения закрывают первое. Кастомная разработка — второе. В этой статье разбираем, чем они отличаются, когда что выбирать и почему большинство нестандартных задач коробка не закроет никакими настройками.

Что такое коробочное решение — и в чём его логика
Готовый продукт в области видеоаналитики — это результат серьёзной инженерной работы. Вендор исследует рынок, выбирает сценарии с наибольшим спросом, собирает под них датасеты — десятки и сотни тысяч аннотированных изображений, — обучает и валидирует модели, выстраивает инфраструктуру доставки и поддержки. Это не упрощённый продукт. Это продукт, оптимизированный под конкретный класс задач.
Типичный набор сценариев коробочного решения (готовых модулей видеоаналитики):
- контроль средств индивидуальной защиты: каска, жилет, перчатки в заданной зоне;
- детектор открытого огня и дыма;
- контроль доступа: человек в запретной зоне;
- подсчёт людей и транспортных средств;
- детектор оставленных предметов;
- контроль очередей и времени обслуживания;
- классификация транспорта на КПП;
- распознавание автомобильных номеров;
- контроль парковки и нарушений разметки.
Для этих задач готовые решения работают хорошо — и это подтверждается тысячами внедрений. Вендор обучал модель именно на таких сценариях, в разных условиях освещения, на разнообразных объектах. Если ваша задача попадает в этот список и условия эксплуатации близки к стандартным — готовый продукт закроет её быстро и с предсказуемым результатом.
Граница применимости у коробочных решений не там, где «плохо работает», а там, где заканчивается область, под которую продукт проектировался.
Модель знает то, на чём обучалась.
Она хорошо работает в условиях, близких к обучающей выборке вендора. Когда условия начинают расходиться — специфическое освещение, нестандартная одежда, непривычный угол камеры, редкий тип объекта — точность падает. Это не дефект архитектуры, это математика: модель экстраполирует от того, что видела. Чем дальше реальные данные от обучающих, тем менее уверенно она работает.
Вторая граница — логика события. Коробочный продукт фиксирует факт: человек в зоне, каска отсутствует, огонь в кадре. Но производственный процесс часто требует контекста: нарушение возникает только при комбинации условий, зависит от времени суток, от статуса соседнего оборудования, от того, какая операция выполняется прямо сейчас. Такую логику нельзя задать настройками — её нужно проектировать и писать под конкретный процесс.
Третья граница — интеграция. Большинство готовых решений умеют оповещать: алерт на экран, уведомление в мессенджер, запись в журнал системы. Но во многих производственных сценариях результат должен попасть в ERP, SCADA, WMS или систему согласований — и не просто как уведомление, а как структурированное событие, которое запускает следующий шаг в процессе. Это уже задача интеграции, которая выходит за рамки типового продукта.
Ни одна из этих границ не означает, что продукт сделан плохо. Она означает, что продукт сделан под определённую задачу — и при выходе за её рамки нужен другой подход.
Пять признаков, что готовое решение не закроет задачу
Это не теоретические критерии, это кейсы из реальной практики наших клиентов, которые обратились к нам после того как коробка уже куплена и запущена.
- Задача выходит за пределы каталога сценариев.
Коробочные продукты покрывают задачи, которые можно сформулировать одним предложением: «человек без каски», «посторонний в зоне», «огонь в кадре». Если ваша задача требует нескольких предложений — это первый сигнал.
Контроль правильности установки детали на станке.
Проверка последовательности операций техпроцесса.
Соответствие укладки продукции спецификации по геометрическим параметрам.
Это не нишевые задачи — они есть на большинстве производств. Правда в другом: вендор готового продукта физически не может собрать обучающую выборку под каждое из тысяч предприятий-заказчиков. Это не упущение — это экономика продуктовой разработки. Он выбирает то, что покрывает максимальное количество клиентов стандартным решением.
Визуальные условия вашего объекта отличаются от стандартных.
Качество работы AI-модели компьютерного зрения напрямую зависит от того, насколько реальные данные похожи на обучающую выборку.Паровой туман над литейной ванной,
блики на глянцевых металлических поверхностях,
конт-свет из производственного проёма,
нестандартная цветовая температура ночной смены, частичное перекрытие объектов на конвейере —
каждый из этих факторов смещает распределение входных данных относительно того, на чём модель обучалась.
Настройка порогов чувствительности перераспределяет ошибки между ложными тревогами и пропущенными нарушениями, но не устраняет саму проблему: модель не видела ваших данных и не умеет на них обобщать.
- Результат должен запускать действие в смежной системе, а не только оповещать.
Коробочные решения, как правило, хорошо реализуют последний шаг уведомления: алерт на монитор охраны, push-уведомление, запись в собственный журнал.
Но производственный и операционный контекст часто требует другого: событие должно создать задачу в системе управления техобслуживанием, заблокировать следующий шаг в MES до устранения нарушения, записать структурированную запись в ERP с привязкой к конкретному заказу, инициировать цепочку согласований в системе документооборота. Это не надстройка над готовым продуктом — это отдельная интеграционная задача, которая требует понимания архитектуры ваших систем и разработки под неё.
- Логика события составная и контекстно-зависимая.
Готовый продукт фиксирует атомарные факты: объект есть или его нет, зона нарушена или нет. Производственная реальность устроена иначе: нарушение возникает только при одновременном выполнении нескольких условий, часть из которых визуальные, а часть — операционные.
«Паллета установлена неправильно» означает одно в зоне хранения и другое в зоне отгрузки.
«Оператор в опасной зоне» — нарушение при работающем оборудовании и норма при плановом обслуживании.
Такая логика не описывается слайдером чувствительности. Она проектируется как отдельный программный слой поверх модели — и этот слой пишется под конкретный регламент конкретного предприятия.
- Готовое решение уже запускали — результат не устроил.
Это самый весомый из пяти признаков, потому что он основан не на предположениях, а на факте. Компания прошла полный цикл: выбор продукта, пилот, попытки донастройки, финальная оценка. Если на выходе из этого цикла точность недостаточна, логика не перестраивается, а интеграция не реализуется средствами продукта — это не проблема конкретного вендора. Это граница класса решений. Следующий шаг — не искать другую коробку, а менять подход.

Чем кастомная разработка отличается от готового продукта "из коробки"
Коробочный продукт — это обученная модель плюс фиксированная логика срабатывания. Вендор собрал датасет, разметил под свои сценарии, обучил модель, упаковал в интерфейс с настройками. Модель знает то, что было в датасете. Логика срабатывания — та, что вендор посчитал применимой для большинства заказчиков.
Когда ваша задача не совпадает с этим датасетом и этой логикой, точность падает. Не потому что продукт плохой — потому что он обучен на других данных, в других условиях, под другие сценарии.
Кастомная разработка начинается с другого места: с ваших данных.
- Сбор данных на объекте. Мы выезжаем и снимаем видео в реальных условиях эксплуатации — с вашим освещением, вашими углами камер, вашей спецификой сцены. Паровой туман над литейной ванной, блики на глянцевых металлических поверхностях, контровой свет из производственного проёма, нестандартная цветовая температура ночной смены — всё это входит в обучающую выборку. Это принципиально: модель, обученная на данных из открытых источников или на стандартных производственных сценах, при переносе на ваш объект столкнётся со смещением распределения входных данных. Никакая донастройка не компенсирует то, чего модель не видела при обучении.
Разметка с предметной экспертизой.
Разметка — это не технический процесс расстановки bounding box'ов. Это фиксация экспертного знания в форме, которую понимает модель. «Дефект» на вашем производстве — это конкретный класс отклонений с конкретными границами приемлемого, которые определяет технолог, а не разметчик-аутсорсер. Разметчик без понимания контекста размечает по визуальному сходству, а не по смыслу — и модель учится не тому. Поэтому перед разметкой мы проводим калибровочную сессию с вашими технологами: формализуем критерии, согласовываем пограничные случаи, выстраиваем таксономию классов. Это занимает время, но определяет качество всего, что будет дальше.
- Выбор архитектуры под задачу.
Компьютерное зрение — это не одна модель на все случаи.
Под задачу бинарной классификации «брак / не брак» оптимален один подход.
Под детекцию нескольких классов объектов с локализацией — другой.
Под попиксельную сегментацию зон — третий.
Под трекинг объектов во времени с анализом траектории — четвёртый.
Выбор архитектуры влияет не только на точность, но и на латентность инференса, требования к вычислительному железу и возможность работы на edge-устройствах без подключения к серверу. В коробочном продукте этот выбор сделан один раз для всех заказчиков. В кастомной разработке он делается под вашу задачу, ваши ограничения по железу и ваши требования к скорости отклика.
- Логика события как отдельный программный слой.
Модель компьютерного зрения решает одну задачу: классифицировать или локализовать объект на входном кадре. Она говорит «вижу объект класса А в зоне Б с уверенностью 0.87». Что делать с этим результатом — отдельная задача, которая к самой модели отношения не имеет. Это слой бизнес-логики: нужно ли накапливать несколько последовательных детекций перед срабатыванием, чтобы отсечь единичные ошибки модели; как событие соотносится с состоянием смежного оборудования; какие исключения предусмотрены регламентом; какой приоритет у этого события относительно других. Именно здесь живёт ваш производственный регламент — не в слайдере чувствительности, а в коде, который проектируется под вас и меняется при изменении процесса.
- Интеграция с инфраструктурой.
Результат работы системы должен попасть туда, где с ним будут работать: создать запись в ERP с привязкой к производственному заказу, передать событие в SCADA, обновить статус в WMS, сформировать протокол ОТК, инициировать задачу в системе технического обслуживания. Это не «отправить алерт на почту» — это двусторонняя интеграция через API или прямое взаимодействие с базой данных целевой системы. Такая интеграция требует понимания архитектуры ваших систем, их API-контрактов, прав доступа и логики обработки входящих данных на стороне приёмника.
При этом существующую инфраструктуру мы не трогаем. Камеры остаются на своих местах. VMS продолжает работать в штатном режиме. Кастомная аналитика встаёт отдельным слоем: получает видеопоток, обрабатывает его независимо и передаёт структурированный результат в нужную систему. Компания уже вложила деньги в камеры, сеть и серверное железо. Наша задача — не заменять эту инфраструктуру, а добавить в неё интеллект под конкретный процесс.

Три кейса, где кастомная разработка была оправдана
Теория становится понятнее на конкретных задачах. Вот три проекта из нашей практики — разные отрасли, разные типы данных, разная инженерная специфика. Общее одно: в каждом случае задача не имела готового ответа.
Аэропорт: анализ рентгеновских снимков и контроль состояния операторов
Рентгеновский снимок багажа — это не фотография. Это наложение десятков объектов разной плотности в одной плоскости проекции. Нож, упакованный между ноутбуком, одеждой и зарядными устройствами, выглядит на снимке как фрагмент контура среди других контуров. Опытный оператор распознаёт его по форме силуэта и характерному поглощению излучения. Уставший оператор в конце шестичасовой смены при высоком пассажиропотоке — не всегда.
Задача технически распалась на две независимые проблемы, которые нужно решать в связке.
Первая — автоматический анализ рентгеновского изображения. Здесь нельзя взять модель, обученную на обычных RGB-фотографиях: рентгеновский снимок — это другой модальный тип данных с другой физикой формирования изображения. Объекты не имеют цвета в привычном смысле — только градиенты плотности материала. Контуры сливаются. Один и тот же предмет выглядит по-разному в зависимости от угла укладки, окружающих объектов и настроек аппарата.
Мы собрали датасет из 30 000+ рентгеновских изображений реального багажа.
Отдельная проблема — редкие классы угроз: нестандартные конфигурации оружия, самодельные устройства, специфические виды аккумуляторов. Реальных примеров таких объектов в обучающей выборке недостаточно для устойчивого обучения.
Решение — генерация синтетических рентгеновских снимков через модели генеративного ИИ: мы синтезировали редкие угрозы в различных контекстах чемоданного содержимого, что позволило сбалансировать классы без ожидания реальных инцидентов. Добавление нового класса угроз по этому пайплайну занимает 1–2 недели. Итоговая точность по ключевым классам — 75–80%, количество ложных тревог снизилось на 20–25%.
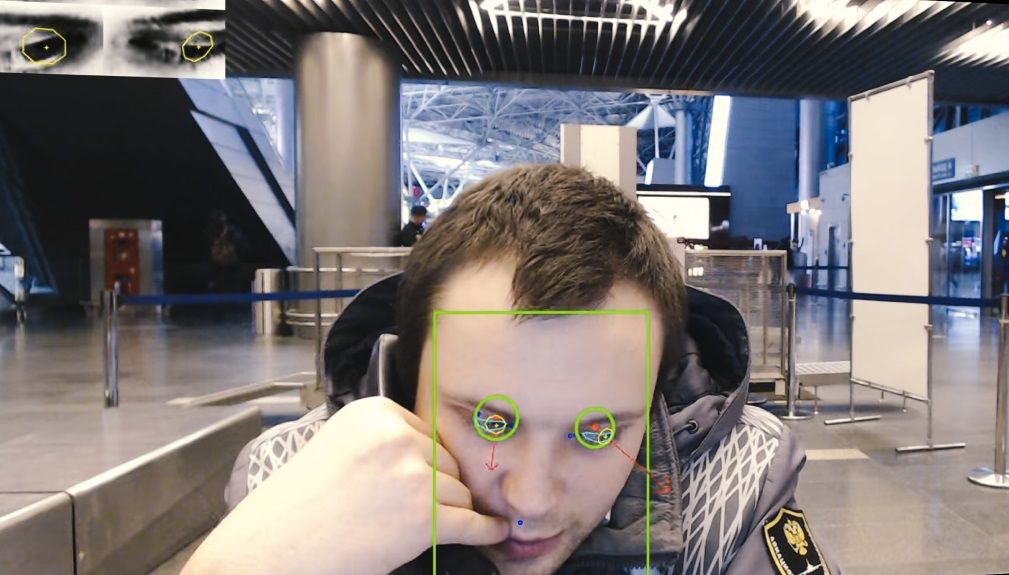
Вторая проблема — сам оператор. Человек не может поддерживать стабильную концентрацию при монотонном визуальном потоке в течение всей смены. Это не вопрос профессионализма — это нейрофизиология. Система контроля состояния оператора работает через отдельную камеру над рабочим местом и фиксирует шесть состояний в реальном времени: засыпание, отворачивание от монитора, взгляд за пределы рабочей зоны, отсутствие на месте, потеря фокуса, расфокусированный взгляд. При фиксации отклонения система подаёт сигнал — не в службу контроля персонала, а самому оператору. Цель не наказание, а поддержка бдительности в критический момент. Пропускная способность пункта досмотра выросла на 20%.
Интеграция решена без модификации оборудования: плата видеозахвата перехватывает видеосигнал с рентгеновского аппарата через стандартный интерфейс, результаты детекции накладываются поверх штатного интерфейса оператора. Гарантия производителя оборудования не затрагивается. Время подключения одной установки — не более двух часов. Совместимость подтверждена на оборудовании нескольких крупных производителей интроскопов.
Комплекс внедрён в нескольких аэропортах (NDA), получена награда Национальной премии "Транспортная безопасность". Решение внедрено также на производстве одного из трёх крупнейших мировых производителей досмотрового оборудования. Читать кейс полностью.
Рентгеновские снимки — это отдельный класс визуальных данных, для которого не существует ни коробочных продуктов, ни открытых датасетов достаточного качества. Задача решается только через специализированный сбор данных и обучение с нуля.
Ферма: автоматическая оценка упитанности крупного рогатого скота
Body Condition Score — стандартизированная метрика упитанности животного по шкале от 1 до 5, которая отражает соотношение жировых отложений и мышечной массы. Отклонение BCS от нормы в обе стороны — истощение или ожирение — напрямую влияет на репродуктивные показатели, надои и риск метаболических заболеваний. Корма составляют до 60% себестоимости молока, и рацион корректируется именно на основе BCS. При ручной оценке «на глаз» погрешность достигает 30% пропущенных отклонений — ветеринар физически не успевает осматривать 3000+ голов с нужной периодичностью.
Техническая сложность задачи начинается с выбора сенсора.
RGB-камера даёт плоское изображение, по которому объёмные характеристики тела животного восстанавливаются только приблизительно. Для точного BCS нужна трёхмерная геометрия задней части туловища — остистые отростки позвонков, маклоки, седалищные бугры. Мы установили 3D-лидар в проходе к доильному залу: каждое животное проходит через зону замера в естественном режиме, без фиксации и без стресса. Лидар строит облако точек с погрешностью до нескольких сантиметров, анализируя до 100 000 точек на одно животное за секунды. По профилю облака точек модель вычисляет BCS.
Сбор данных сам по себе оказался нетривиальной инженерной задачей. Первоначальная конфигурация оборудования давала непригодные кадры: углы установки камер не учитывали специфику прохода конкретной фермы. Пришлось перепроектировать монтаж под реальные условия. С лидаром — отдельная история: в сырых помещениях с высокой запылённостью и движущимися животными сенсор захватывал большое количество паразитных точек. Разработали алгоритмы фильтрации облаков точек для изоляции силуэта животного от фоновых объектов и артефактов среды.
Датасет — 10 000 уникальных животных с ручной разметкой ключевых анатомических точек задней части, выполненной с участием ветеринаров. Редкие классы — истощение и ожирение — в реальных данных встречаются редко по определению, что создаёт дисбаланс классов при обучении. Проблему решили через синтез данных: генеративные модели создавали синтетические облака точек с нужными геометрическими характеристиками для недопредставленных классов.
Идентификация животного решена через RFID-метки: каждый проход через зону замера привязывается к конкретному животному, а не к анонимной «корове в кадре». Это позволяет строить динамику BCS по каждой голове во времени, а не только фиксировать текущее состояние. Отчёты формируются по API несколько раз в сутки и доступны ветеринарам в любом временном разрезе.
Скорость диагностики выросла в 10 раз по сравнению с ручным осмотром. На ферме в 300 голов измеримый эффект от внедрения — 5–7 млн рублей в год за счёт снижения перерасхода кормов на 7%, уменьшения падежа и роста надоев. Срок окупаемости — менее года. Читать кейс полностью.
Каждый компонент в данном кейсе — от выбора сенсора до алгоритмов фильтрации облаков точек — проектировался под конкретные условия конкретной фермы.
Страховая оценка: классификация повреждений автомобиля по фотографии
При урегулировании страхового случая по ОСАГО или КАСКО страховщику нужно ответить на два вопроса одновременно: что повреждено и сколько стоит ремонт.
Первый вопрос исторически решался через выезд эксперта-оценщика. Второй — через ручной мониторинг цен запчастей по более чем 100 источникам. Оба процесса линейно зависят от количества людей в команде и не масштабируются при росте потока заявок.
Задача по компьютерному зрению выглядит просто только на первый взгляд. Классификатор повреждений должен работать не в лабораторных условиях стандартизированной фотосессии, а на реальных фотографиях с осмотра: случайный ракурс, разное освещение, грязный или заснеженный автомобиль, обрезанный кадр, ночная съёмка, бликующая поверхность после дождя. Именно эти пограничные случаи — главная инженерная проблема, потому что на них ошибается любая модель, обученная только на «чистых» данных.
Мы выделили пограничные случаи в отдельный класс с явной разметкой: автомобиль предоставлен не в чистом виде, условия съёмки не позволяют корректно оценить повреждения. Это позволяет системе честно сообщать о неопределённости вместо того, чтобы выдавать уверенный, но неверный ответ. Для страховщика это важнее, чем высокая точность на идеальных фото: ложноотрицательный результат по серьёзному повреждению стоит дороже, чем запрос на повторную фотосессию.

Классификатор работает по пяти классам: повреждений нет, царапины, вмятины, деформации, некорректные условия съёмки. Датасет формировался из реальных фотографий с осмотров: 600 снимков с повреждениями, 600 без, плюс отдельная выборка пограничных случаев, на которых модели традиционно теряют точность.
Параллельно работает система ценовой аналитики: парсит актуальные цены запчастей из более чем 100 источников, ищет аналоги, рассчитывает ценовые метрики, поддерживает базу в актуальном состоянии. Страховщик получает не просто классификацию повреждения, а рекомендацию по стоимости ремонта с учётом текущей рыночной конъюнктуры — включая наличие оригинальных и альтернативных запчастей в регионе. Читать кейс полностью.
Такой связки — CV-классификация плюс ценовая аналитика плюс обработка пограничных случаев — мы не нашли на тот момент ни в одном продукте. Каждый компонент по отдельности существует, но именно их интеграция в единый пайплайн под специфику страхового урегулирования потребовала кастомной разработки.
Три отрасли. Три принципиально разных типа входных данных: рентгеновские снимки, облака точек от 3D-лидара, обычные фотографии с произвольными условиями съёмки. В каждом случае задача была достаточно специфичной, чтобы не иметь готового решения — и достаточно конкретной, чтобы решить её правильно.
Когда стоит начать с коробки
Кастомная разработка — не универсальный ответ, и мы не пытаемся сделать его таковым. Есть задачи, которые готовый продукт закроет быстрее, дешевле и с предсказуемым результатом. Выбор инструмента определяется задачей, а не идеологией.
Готовое решение — правильный выбор, когда выполняются три условия одновременно: задача попадает в стандартный каталог сценариев вендора, визуальные условия объекта достаточно близки к тем, на которых обучалась модель, и на выходе нужен алерт, а не действие в смежной системе.
Контроль касок и жилетов в типовом цеху с нормальным освещением, подсчёт людей на входе, детектор открытого огня, контроль въезда транспорта на территорию, мониторинг запретных зон — всё это задачи, под которые коробочные продукты создавались целенаправленно и на которых они показывают стабильный результат. Вендор вложил в эти сценарии серьёзные ресурсы: большие датасеты, многократную валидацию, накопленный опыт тысяч внедрений. Пытаться воспроизвести это с нуля ради типовой задачи — неоправданные затраты.
Готовое решение также оправдано, когда требования к интеграции минимальны. Если достаточно алерта на экран охраны или уведомления в мессенджер — не нужно строить интеграционный слой под ERP или SCADA. Простота здесь работает в пользу готового продукта: меньше точек отказа, быстрее запуск, ниже стоимость поддержки.
Отдельный сценарий — ограниченный бюджет при необходимости быстро показать результат. Готовый продукт позволяет запустить систему за дни или недели, не проходя полный цикл кастомной разработки. Даже если функциональность частичная, работающий прототип часто ценнее идеального решения через полгода.
Коробка бывает и осознанным первым шагом к кастому — и это нормальная инженерная стратегия.
Запустить готовый сценарий, зафиксировать, где именно он перестаёт справляться, понять конкретные ограничения на реальных данных вашего объекта — это гораздо лучшее техническое задание для кастомной разработки, чем абстрактное «хотим AI-контроль процесса». Большинство компаний, с которыми мы работаем, прошли именно этот путь: коробка помогла сформулировать задачу точнее, чем любое предпроектное интервью. Это не провал первого внедрения — это способ снизить риски второго.
Граница между "берите коробку" и "нужен кастом" проходит не по бюджету и не по амбициям. Она проходит там, где заканчивается область применимости готового продукта: нестандартные визуальные условия, составная логика события, необходимость интеграции с инфраструктурой, специфика данных, которой нет в обучающей выборке вендора. Если хотя бы один из этих факторов присутствует — коробка не закроет задачу независимо от того, сколько времени потратить на настройку.
Кастом или коробка: в чём разница
Если коротко — вот чем они отличаются по ключевым параметрам.
| Коробка | Кастомная разработка | |
| Данные для обучения | Датасет вендора — типовые сцены, стандартные условия | Ваши данные: ваш объект, ваше освещение, ваша специфика |
| Сценарии | Фиксированный набор из каталога | Любая логика события под ваш процесс |
| Точность на вашем объекте | Зависит от того, насколько ваши данные похожи на обучающую выборку | Модель обучена именно на ваших условиях |
| Интеграция | Алерт на экран или email | Запись в ERP, SCADA, WMS, OTK, любую систему |
| Инфраструктура | Часто требует замены или дополнения оборудования | Работает поверх существующих камер и VMS |
| Кастомная бизнес-логика | Настраивается слайдерами в пределах заложенных параметров | Любые условия и исключения — пишутся в коде |
| Скорость старта | Быстро: от нескольких дней до недель | Дольше: от месяца на MVP, несколько месяцев на полное внедрение |
| Стоимость входа | Ниже | Выше |
| Что происходит, если задача нестандартная | Ложные тревоги, функционал которого нет | Решаема, ведь в этом и есть суть кастомной разработки |
Как устроен кастомный проект в NeuroCore
Мы работаем поэтапно, с понятным результатом на каждом шаге.
- Проблемное интервью. Разбираем задачу, смотрим на инфраструктуру, понимаем, что уже есть и что нужно добавить. На выходе — понимание, решаема ли задача и каким путём.
- Сбор данных. Выезжаем на объект, собираем данные с ваших камер в реальных условиях. Более 20 специалистов по сбору и разметке, с опытом выезда на объекты. Размечаем под конкретную задачу — это фундамент модели.
- Разработка и пилотный запуск. Обучаем модель, настраиваем логику события, строим интеграцию с вашей инфраструктурой. Пилот — от одного месяца на вашем объекте с реальными метриками. На этом этапе видно, работает ли решение.
- После подтверждения пилота — масштабирование. Решение запускается на всех объектах, онлайн или оффлайн в зависимости от требований.
У нас есть собственные серверы с GPU и инфраструктурой для обучения моделей. Мы не зависим от внешних вычислительных мощностей и не теряем время на настройку среды.
60 реализованных проектов, 53 города пилотирования, более 10 000 распознаваний объектов в сутки нашими нейросетями.
Итог
Выбор между готовым продуктом и кастомной разработкой — это инженерное решение, а не вопрос бюджета или амбиций. Оно определяется одним критерием: насколько ваша задача совпадает с классом задач, под который проектировался продукт.
Коробочное решение — это зафиксированная обучающая выборка, зафиксированная архитектура модели и зафиксированная логика срабатывания. Всё это оптимизировано под сценарии с максимальным охватом рынка.
Если ваша задача попадает в эту область — продукт отработает хорошо и с первого дня. Это правильный выбор.
Если задача выходит за эту область — начинаются структурные проблемы, которые не решаются настройкой порогов. Модель ошибается не потому что плохо обучена, а потому что ваши данные статистически далеки от её обучающей выборки. Логика события не перестраивается не потому что продукт недоработан, а потому что ваш регламент не был известен при его проектировании. Интеграция отсутствует не потому что вендор не постарался, а потому что ваша инфраструктура уникальна. Это не проблемы конкретного продукта — это граница всего класса тиражируемых решений.
Кастомная разработка закрывает именно этот разрыв. Модель обучается на ваших данных в ваших условиях. Логика события проектируется под ваш регламент и меняется вместе с ним. Результат передаётся в ту систему, где с ним будут работать — в ERP, SCADA, WMS, протокол ОТК. Существующая инфраструктура не заменяется, а получает аналитический слой поверх.
Три кейса в этой статье — рентгеновские снимки, 3D-лидар на ферме, классификация повреждений для страховщика — объединяет одно: в каждом из них задача была сформулирована достаточно точно, чтобы понять, почему готового ответа нет. Это и есть правильная отправная точка для кастомного проекта: не «хотим AI», а «вот наш процесс, вот данные, вот где система должна принимать решение и куда передавать результат».
Если после прочтения этой статьи вы понимаете, что ваша задача выходит за рамки стандартного каталога — расскажите нам о ней. Мы разберём, решаема ли она, какой подход подойдёт и что потребуется для запуска: